モータードライバ
PCA9685 16Channel 12bit PWM サーボドライバー


Amazon より adafruit互換品を購入。 1980円。
使い方のURLが箱に書いてあった。 これ
追加購入、Amazon 300円
VCC 3~5V V+ 6V MAX
さっそくライブラリをダウンロードして使ってみた。 Adaflruitのサイトからライブラリをダウンロード。
I2Cアドレスはデフォルト0x40。I2Cアドレス設定ジャンパーのA0をショートすると0x41となる。
| ダウンロード | ライブラリをコピーしてスケッチの例を実行 |
|---|
2相ステッピングモータTS3692N
 ステップ角 1.8°200ステップ 定格3.5V
ステップ角 1.8°200ステップ 定格3.5V
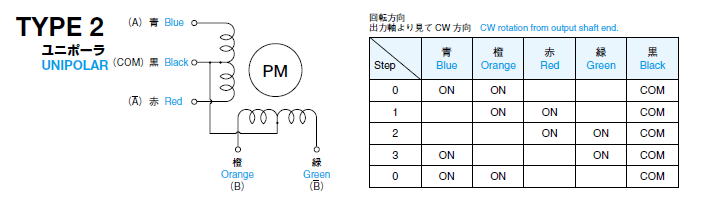
デジットより購入 500円 青=>青、赤=>橙、橙=>白、緑=>黄
L9110S Hブリッジ ステッピングモータドライバ
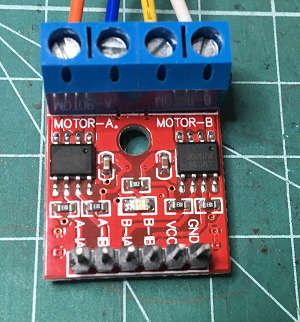
Amazonより購入 170円 データシート
ステッピングモーターTS3692を回してみた。
//TS3692N65 3V
//カタログ通り励磁 動作確認済
//
#define A1 3
#define A2 5
#define B1 6
#define B2 9
#define st 200
const int ledpin = 13;
const int RA1 =3;
//int pin[4]={A1,A2,B1,B2};
int pin[4]={A1,B1,A2,B2};
//int cw_R[] ={1,0,0,1, 1,0,1,0, 0,1,1,0, 0,1,0,1}; //
int cw_R[] ={1,0,0,1, 1,1,0,0, 0,1,1,0, 0,0,1,1}; //
int ccw_R[] ={0,1,0,1, 0,1,1,1, 1,0,1,0, 1,0,0,1}; //
void setup() {
pinMode(A1,OUTPUT);
pinMode(A2,OUTPUT);
pinMode(B1,OUTPUT);
pinMode(B2,OUTPUT);
reijiS();
delay(1000);
Serial.begin(9600);
}
void loop() {
if(Serial.available() > 0){
switch(Serial.read()) {
case 'f':
for(int i=0;i<50;i++)motor_cw();
//reijiS();
break;
case 'b':
for(int i=0;i<50;i++)motor_ccw();
//reijiS();
break;
case 'c':
for(int i=0;i<1000;i++)motor_cw();
//reijiS();
break;
case 'a':
step_1();
break;
default:
reijiS();
break;
}
}
}// end loop
void step_1(){
while(1){
motor_cw();
delay(1000);
}
}
void motor_cw(){
int j=0;
while(j<16){
for(int i=0;i<4;i++){
digitalWrite(pin[i],cw_R[j]);
j++;
delayMicroseconds(st);
}
}
}
void motor_ccw(){
int j=0;
while(j<16){
for(int i=0;i<4;i++){
digitalWrite(pin[i],ccw_R[j]);
j++;
delayMicroseconds(st);
}
}
}
void reijiT(){
digitalWrite(pin[0],LOW);
digitalWrite(pin[1],LOW);
digitalWrite(pin[2],LOW);
digitalWrite(pin[3],LOW);
}
void reijiS(){
digitalWrite(pin[0],HIGH);
digitalWrite(pin[1],HIGH);
digitalWrite(pin[2],HIGH);
digitalWrite(pin[3],HIGH);
}
|
|---|
8BYJ48 5V ステッピングモーター / ULN2003 ドライバーを試す
[GPG] 28BYJ48 5V ステッピングモーター / ULN2003 ドライバー基盤 2組セット Arduino等の電子工作用 Amazonより購入 1480円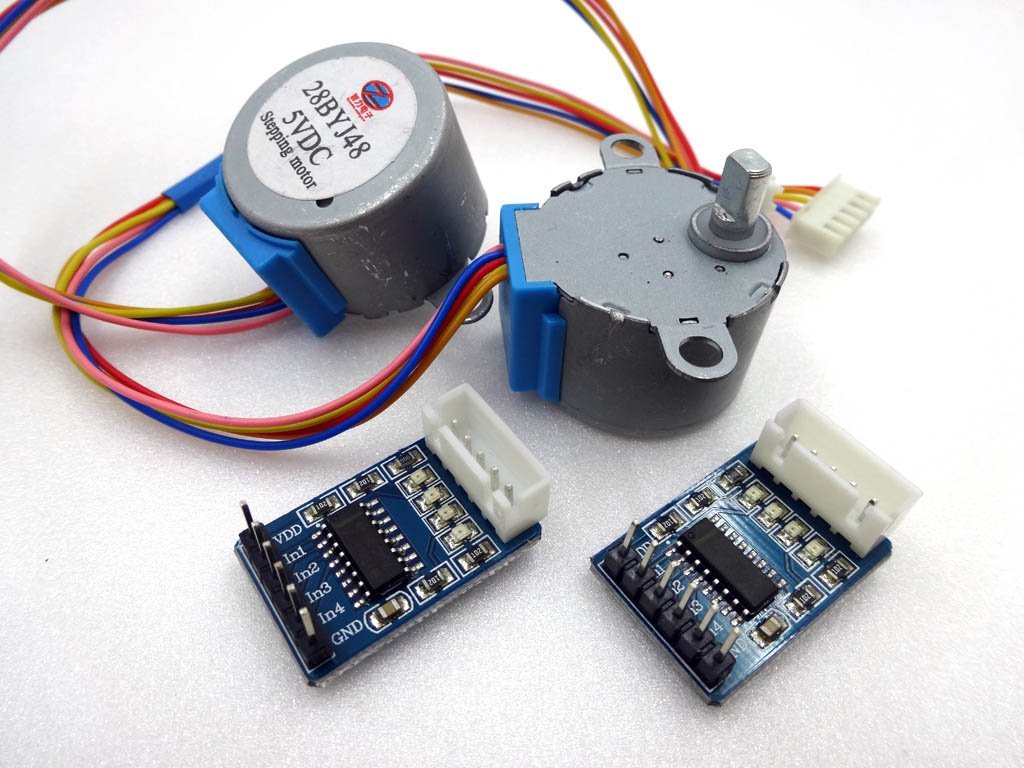
// このサンプルコードは28BYJ-48の時計回り・逆回りを行うデモです。
// ULN2003 インターフェースボードを使用。つまりただのトランジスタアレイで駆動するだけ
// 28BYJ-48モーターは4相、8ビートモーター。
// 減速ギア非68倍。 1バイポーラ巻線。ステップ角は5.625/64。
// 動作周波数100PPS。電流92mA。
////////////////////////////////////////////////
//Base Code
// 4tronix Arduino http://www.4tronix.co.uk/arduino/Stepper-Motors.php
int motorPin1 = 8; // Blue - 28BYJ48 pin 1
int motorPin2 = 9; // Pink - 28BYJ48 pin 2
int motorPin3 = 10; // Yellow - 28BYJ48 pin 3
int motorPin4 = 11; // Orange - 28BYJ48 pin 4
// Red - 28BYJ48 pin 5 (VCC)
int motorSpeed = 1200; //速度。数値が小さいほど速くなる。800以下は脱調して動かない
int count = 0; // count of steps made
int countsperrev = 512; // number of steps per full revolution
int lookup[9] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001,B00000};
//////////////////////////////////////////////////////////////////////////////
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(115200);
}
//////////////////////////////////////////////////////////////////////////////
void loop(){
if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else
anticlockwise();
count++;
}
//////////////////////////////////////////////////////////////////////////////
void anticlockwise() //反時計回り
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise() //時計回り
{
for(int i = 7; i >= 0; i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
|
|---|